| Issue 9 |
Long range surveillance in all weathers is an essential requirement for the armed services, whether in times of peace or conflict. Airborne radar is one of the principal sensors able to provide such a capability.
This article is a summary of the topics covered in the 22nd Jenkin Lecture. It presents an overview of some airborne surveillance radar applications, starting with a brief introduction to the concept of radar and the early history of airborne surveillance radar, from before WWII. The early war-time radars evolved into radars such as the Searchwater family of radars, in service with the UK Royal Air Force and Royal Navy. The latest generation of airborne surveillance radars for battlefield surveillance are now being deployed on Unmanned Air Vehicles (UAVs), such as the Viper radar being developed by Thales for the British Army's Watchkeeper system. The operational use of these radars and the information that can be derived from them are briefly described here. The article finishes with a look at some technology trends for future systems.
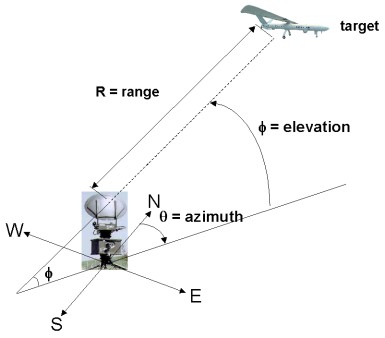
Radar is an electromagnetic sensor for the detection and location of reflecting objects. Figure 1 shows radar operation in simple terms. The radar radiates electromagnetic energy, usually in the form of a short pulse, into space from a directive antenna. The radar pulse propagates at the speed of light through space until it encounters a reflecting object, known as a target. The energy reflected by the target propagates back towards the radar, where it is intercepted by the radar antenna (now switched from transmit to receive). A radar receiver processes the intercepted energy to indicate the presence of the target. The range to the target is estimated from the time taken for the pulse of energy to propagate from the radar to the target and back. The radar antenna usually operates over a narrow angular beam and the bearing of the target is estimated from the pointing direction of the antenna at the instant that the target is detected.
|
| Figure 1: Radar operation |
Surveillance radars may emit a continuous stream of pulses (typically of the order of thousands of pulses a second, each having a length of the order of a few microseconds) and scan the antenna beam in azimuth and elevation to achieve coverage in range and bearing. The radar returns from a target contain a considerable amount of information: not only the range to a target, but its radial velocity (imparting a Doppler shift to the radar carrier frequency) and, often, its shape. A modern radar uses very considerable computing power to process the returns from targets to provide detection, tracking, classification and, indeed, imaging of targets.
In August 1937 an RAF Avro Anson flew with the RDF2 equipment - what was to become known as radar. This was the world's first airborne surveillance radar. Figure 2 is a picture by Anthony Cowland commissioned by THORN EMI to commemorate the 50th anniversary of the death of Alan Blumlein (see below). This radar operated at a frequency of 200 MHz (VHF) and it detected ships at a range of eight miles on that first flight. At that time, the UK company EMI was developing the first electronically scanned television system and RDF2 used an EMI television receiver, operating at 60 MHz, as its intermediate frequency (IF) amplifier.

|
| Figure 2: "The Big Echo" painting by Anthony Cowland illustrating the first airborne radar flight in 1937 |
EMI was not initially involved in radar but at the start of the war it took the technology developed for television and applied it to radar. Alan Blumlein had been a lead engineer in the development of television and then took over the radar work at EMI, until his death in a flying accident (testing the H2S radar) in 1942 (http://www.rafcaa.org.uk/goodrich.html). EMI had undertaken the engineering development of the H2S radar earlier that year, using the newly invented magnetron transmitter. The magnetron allowed high transmitter power to be developed at microwave frequencies (typically 1-10 GHz), providing better angular resolution from an aircraft antenna and improved immunity from jamming, compared to the existing VHF radars.
H2S was originally developed as a bomb-aiming radar, fitted to aircraft in RAF Bomber Command. Indeed, H2S Mk9 was still in service with the RAF in 1982, fitted to the Vulcan bombers that attacked Port Stanley in the Falklands War. H2S Mk1 operated at a frequency of 3 GHz and subsequent variants worked at 10 GHz, still the frequency band of many modern airborne surveillance radars. In 1942, radar was becoming an important weapon for hunting German U-boats in the North Atlantic. The ASV (Anti Surface Vessel) Mk2 radar, operating at 200 MHz was being deployed but was becoming vulnerable to jamming by the enemy. H2S Mk1 was fitted as ASV Mk3 in Wellingtom aircraft of RAF Coastal Command. The introduction of these centimetric radars was a major contribution to the winning of the battle of the Atlantic.
After the war, during the 1950s, EMI developed the ASV 21 maritime surveillance radar fitted to RAF Shackleton, Canadian Argus and Indian Constellation aircraft. In the early 1970s it was fitted to the new Nimrod MR1 aircraft, developed from the Comet airliner.
Coming more up to date, the RAF Nimrod MR2 aircraft entered service in 1980 and was recently retired from service in March 2010. This had the Searchwater radar, manufactured by EMI Electronics (now Thales). These Nimrod maritime patrol aircraft have been a vital element of our defence capability. The RAF originally had 20 Nimrod MR2 in service and this had reduced to 11 by the end of their service life with some of the fleet being used in the development of the Nimrod MRA4 (described below). They were used for submarine hunting (ASW), maritime surveillance (ASuW, previously ASV) and search and rescue. The aircraft had an endurance of 10 to 12 hours and a range of about 3800 miles. They operated at up to 40,000 ft for long range surveillance or at 500 ft or below for ASW operation. The aircraft were packed with electronics, including ESM, FLIR, MAD, sonobuoys, cameras, DAS, communications equipment and weapons, including Harpoon, Sting Ray torpedoes, Sidewinder air-to-air missiles and bombs.
Figure 3 shows a number of submarine masts, including a communications mast, a search periscope, an ESM mast and an attack periscope. These traditionally have been the main target for the radar and what drove its design. The smallest mast is the attack periscope, which may only be exposed about a metre above the sea surface. The radar must be able to detect such a mast after a brief exposure of only a few seconds in a high sea state and a range of tens of miles.

|
| Figure 3: Submarine masts |
The Searchwater radar was in its day one of the world's highest performing maritime surveillance radars. It had many advanced features, including pulse compression, pulse-to-pulse frequency agility, digital signal processing and computer control. The display was a colour raster-scanned CRT and operator control was achieved through the use of hard buttons, a roller ball and alpha-numeric keypad entry. The operator had considerable ability to reconfigure the radar according to the task and prevailing conditions.
In the late 1990s Thales won the contract to design and manufacture the next generation of maritime surveillance radar, Searchwater 2000, for the new Nimrod MRA4. It provides similar modes to the original Searchwater radar, with several new modes, including coherent air-to-air detection and radar imaging modes, known as synthetic aperture radar (see discussion below). The new radars include fully software-defined signal and data processing, providing an adaptive multifunction radar system with rapid mode switching and radar reconfiguration.
The new Nimrods are being manufactured by rebuilding the MR2 aircraft, with new wings, new engines and completely new avionics, including the new radar. A prototype aircraft is shown in Figure 4.

|
| Figure 4: Nimrod MRA4 prototype |
The new Rolls-Royce engines will give it a range of 6000 miles, compared to about 3800 miles for the MR2. Unfortunately this aircraft is still not in service and is many years late. The originally planned in-service date was 2003 for 23 aircraft and now only nine aircraft are due to enter service in 2012.
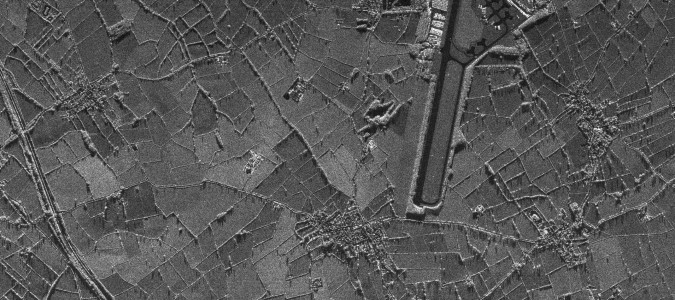
Modern airborne surveillance radars, such as the Searchwater 2000 and the I-Master UAV radar discussed later, include a radar imaging capability, called Synthetic Aperture Radar (SAR). Figure 5 is an example of a high resolution SAR image of fields, roads, buildings and an airfield. Notice the different textures and detail that can be observed.
|
| Figure 5: Synthetic Aperture Radar image of airfield runway and fields |
A radar antenna with an aperture (width) D will have a beamwidth given by λ/D radians, where λ is the wavelength of the electromagnetic signal. A typical airborne microwave radar antenna may have a beamwidth of about 2°, achieved with an antenna aperture of about 1 m when operating at a frequency of 10 GHz. At long ranges the spatial resolution of such a radar may therefore be very poor. A beam of 2° is subtended by a cross-range dimension of about 3 km at a range of 100 km, and this means that the radar cannot resolve in angle objects spaced closer than about 3 km at that range. However, a realistic military requirement may be to resolve individual vehicles spaced only a few metres apart.
The range resolution of the radar is determined by its pulse bandwidth and a range resolution of the order of, say, 1 m is relatively easy to achieve (radars with range resolutions of the order of 10 cm are now practical). A comparable azimuth resolution at 100 km range would require a real aperture of about 3 km at an operating frequency of 10 GHz, which is clearly not realistic for an airborne platform.
By using a coherent radar (a radar that can measure the phase as well as the amplitude of the signals reflected from a target) it is possible to achieve considerably improved azimuth resolution by utilising the Doppler or phase content of the returns from successive radar pulses transmitted as the aircraft flies along a straight track. The radar records the returns to synthesise the signal that would have been achieved from a larger aperture lying along the aircraft track. This is the basis for synthetic aperture radar. The improved angular resolution of a target can be considered as being achieved by the translation or rotation of the target relative to the radar, similar to optical holography.
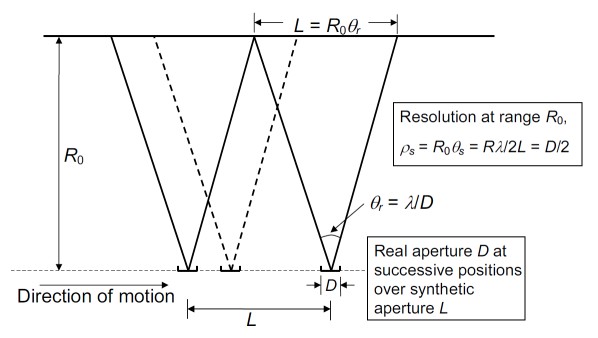
Figure 6 explains the basic principle of side-looking swath SAR imaging mode. A real aperture D has a real beamwidth θr that illuminates a cross-range extent of L ≈ R0θr at a range R0 (R0 >> L). By flying along a distance L and recording returns at intervals of λ/2 we can synthesise a phased array aperture of length L. Such an aperture would have a beamwidth given by λ/2L (a factor 2 has appeared because the beam is formed by a two-way transmission of the radar pulses) and a range resolution ρs which equals, after substitution in the formulas, D/2 - a remarkable result that says we can achieve a cross-range resolution of half the real aperture, independent of range.
|
| Figure 6: Synthetic Aperture Radar |
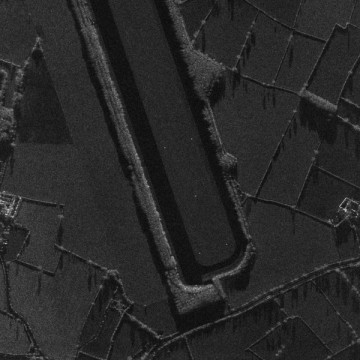
A radar operating in this mode can create a continuous map along its flight path, as shown for example in Figure 5. By steering the antenna to illuminate a fixed patch on the ground we can achieve synthetic apertures greater than L in the example here. This is known as spotlight SAR, and resolutions of down to less than 10 cm have been achieved in this way with microwave radars. Figure 7 shows an example of a spotlight SAR image, of the same scene as Figure 5, but imaged from a different direction. In this image, the runway shows up as black, with little signal reflected back towards the radar. Notice also the shadows cast by the trees and hedges in the fields.
|
| Figure 7: Spotlight SAR image of airport runway (see Figure 5) |
In the 1970s the Royal Navy had large aircraft carriers with "organic" AEW (i.e. available on board) provided by Fairey Gannet aircraft. With the arrival of the "through-deck cruisers", flying helicopters and vertical take-off and landing (VTOL) Harrier aircraft, but no fixed-wing AEW aircraft, it was assumed that AEW cover would be provided by the RAF Shackletons or their successors, the E3-D AWACS, operating from land bases. By contrast, the large USA aircraft carriers have continuous organic AEW cover provided by their Hawkeye AEW aircraft.
Then in the Falklands War of 1982, the Royal Navy sailed to the South Atlantic where no AEW cover was available. This led to the early loss due to air attack of HMS Sheffield and subsequently a number of the RN ships, highlighting an urgent need for organic AEW.
In response to this urgent operational requirement, over a period of 11 weeks THORN EMI developed two prototype AEW platforms installed in Sea King helicopters, using modified Searchwater radars and a completely new antenna assembly and aircraft installation. These were embarked for the Falklands and arrived just as the war ended. The radars were very successful and RN 849 Squadron, which had previously flown the Gannet AEW aircraft, was reformed with the AEW Sea King Mk2 helicopters.
This radar and all the mission system avionics have now been completely replaced by Thales, in the Sea King Mk7 Airborne Surveillance and Control (ASaC) aircraft, shown in Figure 8.

|
| Figure 8: Sea King Mk7 ASaC |
The radar antenna and scanner is housed to the side of the aircraft in the "dustbin" assembly, which swings upwards towards the rear of the aircraft for landing. The pulse Doppler radar provides a full "look-down" capability to detect air targets over land and sea.
The use of unmanned air vehicles is becoming increasingly important in modern warfare. These platforms can provide wide area surveillance over long time periods, sending imagery and radar detections down to the forces on the ground. For example, the Watchkeeper tactical UAV (TUAV) system is about to enter service with the British Army. This system has been designed by Thales to meet the customer's statement of need:
WATCHKEEPER is required to provide accurate, timely and high quality imagery and Image Intelligence (IMINT), collected, collated, exploited and disseminated to satisfy land manoeuvre commanders' critical information and intelligence requirements within the context of Joint operations throughout a range of environments and across the spectrum of conflict.
The TUAV for Watchkeeper is shown in Figure 9.

|
| Figure 9: Watchkeeper tactical UAV |
The main sensors on the Watchkeeper platform are a radar and an electro-optic and infra-red (EO/IR) imaging system, in the two pods below the fuselage. Imagery and data collected by the sensor are relayed to a ground control station using a microwave data link. Whilst EO/IR sensors are widely used in many applications, radar is the only sensor that can provide all-weather, day and night, operational capability at long ranges. The radar has two main modes of operation, synthetic aperture radar (SAR) imaging and ground moving target indication (GMTI).
SAR images, such as those in Figures 5 and 7, can show stationary vehicles and buildings, as well as cultural details, with spatial resolutions of less than a meter. An important application is the detection of changes between images of the same scene, taken at different times. Some changes can be detected in this way from optical images but this can be difficult, as the time of day and weather can significantly affect the images. Also the statistics of optical image amplitude and colour are not significantly affected by subtle changes. With a radar, the illumination of the scene can be repeated very accurately from successive flights of an air platform. Large changes to a scene, such as the movement of parked vehicles, may be detected by comparing the intensity of individual pixels (resolved picture elements) in accurately aligned images. However, if the phases as well as the amplitudes of the returns are compared, much more subtle changes can be detected. By comparing the phase of the signals, changes due to relative position movements of fractions of the radar wavelength (typically, therefore, fractions of 3 cm) can be detected. Such small changes would not be evidenced by any discernible change in image intensity.
As well as the ability to image a stationary scene, and look for long-term changes in it, another important military requirement is the detection and localisation of moving targets. The GMTI radar mode provides the ability to detect slow moving targets over a large area and report their position in geographic map coordinates. Individual targets may also be tracked.
The technology of airborne radar continues to evolve. The advanced radar results discussed here require very precise radar instrumentation and considerable computing power for the signal and data processing. The large airborne radars discussed here (such as the Searchwater radar variants in the Sea King Mk7 and Nimrod MRA4) use travelling wave tubes (TWT) to generate their high power transmitted pulses. Increasingly now radars are being developed with solid state transmitters, using a technology known as Active Electronically Scanned Arrays (AESA). Now, instead of a single large TWT transmitter, the power is generated by a large number of small solid-state transmit/receive modules, distributed over the antenna aperture. The modules also act as the radar receiver, with the focused antenna beam being formed and steered electronically. This technology brings significant advantages from the ability to steer the beam very rapidly and also to adapt the beamshape, for example to steer nulls in the pattern in the direction of a jammer. In the area of signal processing, much research continues into the development of robust, high performance SAR and GMTI systems, with particular emphasis on classification and identification of targets, as well as detection and tracking in difficult environments. Perhaps the greatest challenge for radar designers in the future will be to achieve the very high performance discussed here with radars that are lightweight, small size and, above all, low cost.
Simon Watts graduated from the University of Oxford in 1971 (Engineering Science, St John's), obtained an MSc from the University of Birmingham in 1972 and a PhD from the CNAA in 1987. He is currently deputy Scientific Director of Thales UK, Defence Mission Systems, and is also a Visiting Professor in the department of Electronic and Electrical Engineering at University College London. He joined Thales (then EMI Electronics) in 1967 and since then has worked on a wide range of radar and EW projects. He is author and co-author of over 45 journal and conference papers, a book on sea clutter and several patents. He was chairman of the international radar conference RADAR-97. He was appointed MBE in 1996 for services to the UK defence industry and is a Fellow of the Royal Academy of Engineering, Fellow of the IET and Fellow of the IEEE.
|
| << Previous article | Contents | Next article >> |
| SOUE News Home |
Copyright © 2010 Society of Oxford University Engineers |
SOUE Home |